Remarque : La possibilité d’augmenter un vecteur d’un autre vecteur était propre à l’ancienne version de Sofus (alors orthographiée Sophus). L’évolution du langage et de son interface ayant amené à l’introduction de matrices et vecteurs dans Blockly, c’est cette nouvelle version qui est présentée ici. L’ancienne version est lisible en bas de l’article dans un « bloc »
Points et vecteurs
Un point est une matrice ayant deux coordonnées. Un vecteur est aussi une matrice ayant deux coordonnées (ou 3 si on est dans l’espace). Autrement dit, matriciellement parlant, Sofus ne sait pas faire la différence entre points et vecteurs. Ce qui permet de faire des calculs entre eux. Voici donc avec les roulements de tambour de circonstance, la notation de Grassman :
Pour calculer les coordonnées du vecteur allant de A (point) à B (point), on soustrait A à B :
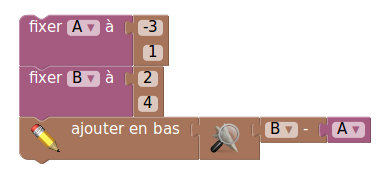
On voit qu’il ne suffit pas d’afficher (ou « ajouter en bas », de la zone d’affichage en l’occurence) un point ou un vecteur pour connaître ses coordonnées : Il faut insérer le dessin représentant l’examen d’une flèche à la loupe pour que ces coordonnées soient affichées en lieu et place du « object Object » qui sert d’objection à JavaScript quand il ne connaît pas le type d’un objet. Pour toutes les matrices il faut insérer cet inspecteur sans lequel on ne peut inspecter les matrices.
Maintenant, pour calculer l’image de A (un point) par la translation de vecteur u, on additionne u à A :
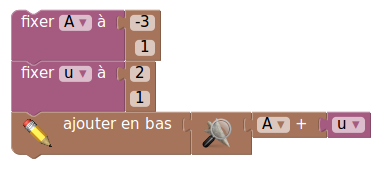
On peut additionner, soustraire des vecteurs mais aussi les multiplier scalairement ou par des réels, et même calculer leur angle. Les addition, soustraction et multiplication par un réel fonctionnent aussi avec d’autres matrices que les vecteurs.
Pour avoir les coordonnées du milieu de AB, on additionne A avec B et on multiplie le résultat par 0,5 :

Sofus a aussi un bloc « symétrique par rapport à » dont on devine l’usage...
Distances et droites
On a vu ci-dessus comment calculer un vecteur à partir de son origine et de son extrémité. Or ce vecteur possède, entre autres, une norme, ce qui permet de calculer la distance AB :
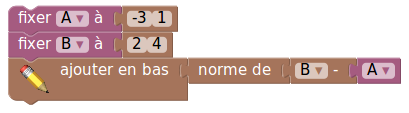
On remarque que pour une fois, on n’a pas eu besoin de la loupe sur la flèche, c’est parce que la norme est un réel et que celui-là n’a pas besoin de subir une inspection puisque JavaScript le connaît.
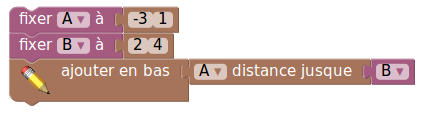
On peut faire plus simple :
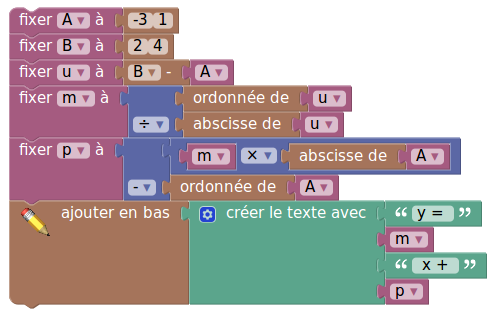
Et pour l’équation réduite de la droite (AB), on a juste à traduire les formules du cours :
Résolution de systèmes
Soit à résoudre le système
- 2x+3y = 31
- x-y = 3
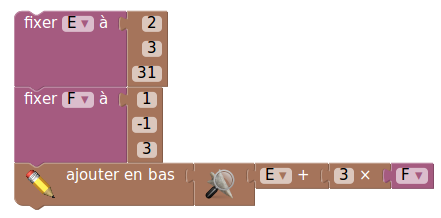
On constate que si on multiplie la seconde équation par 3, il y figurera -3y qui va s’annuler avec 3y si on additionne ensuite les deux équations. Pour effectuer cette multiplication par 3, on peut représenter l’équation ax+by=c par le vecteur de coordonnées (a,b,c) et tripler ce vecteur :
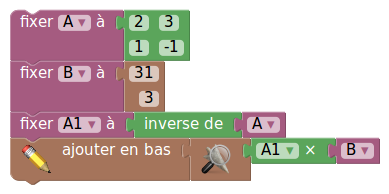
L’affichage, avec le codage vectoriel choisi ici, se note 5x=40 qu’il est aisé de résoudre. Mais on peut résoudre tout le système d’un coup, avec les matrices, en se calquant sur la résolution de ax=b, dont la solution x=b/a s’obtient en multipliant les deux membres par l’inverse de a : AX=B peut se résoudre de façon analogue en multipliant les deux membres par l’inverse de A, même si A est une matrice. Une précaution à prendre toutefois : La multiplication des matrices n’étant pas commutative, c’est bien à gauche qu’on doit effectuer la multiplication par A1 (inverse de A) :
Si on essaye de multiplier à droite, on a d’ailleurs une erreur de dimensions...
Similitudes directes
Une similitude directe est le produit d’une constante (le rapport de similitude) par une matrice de rotation. De telles matrices peuvent être définies directement :

Ici, en itérant la similitude, on crée un nuage de points que la tortue de Sofus peut dessiner :
Diagonalisation
Diagonaliser la matrice $\left( \begin{array}{rr}1&1\\1&0\end{array}\right)$, c’est trouver une matrice diagonale D et surtout une matrice « de passage » P telles que $\left( \begin{array}{rr}1&1\\1&0\end{array}\right) = P D P^{-1}$. On note P1 l’inverse de P, pour des questions de notation des variables dans Blockly. L’algorithme illustré ci-dessous permet de calculer P avant D, c’est-à-dire de donner les vecteurs propres de la matrice, et pour un vecteur propre V, le produit MV donne directement la valeur propre correspondante. L’idée est la suivante :
Lorsque que l’exposant tend vers l’infini, les vecteurs colonne de la matrice deviennent asymptotiquement des vecteurs propres associés à la plus grande valeur propre.
On commence donc par calculer les puissances successives de la matrice pour vérifier ça :
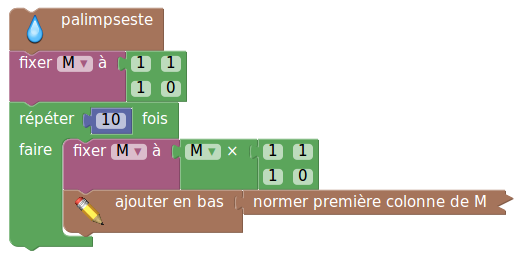
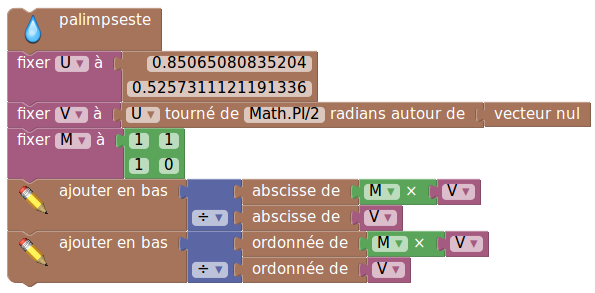
Comme les vecteurs colonne tendent vers l’infini, on s’est permis de normer la première colonne qui « l’emporte sur les autres ». Cela révèle que ses coordonnées convergent vers des nombres que l’on va copier-coller dans les coordonnées d’un vecteur U :

Alors MU est colinéaire avec U, comme le montrent les affichages des quotients des abscisses (respectivement, des ordonnées) : Ces quotients sont non seulement égaux entre eux, mais à une constante qui se trouve dans le menu de Blockly :

Et voilà ! Une valeur propre avec son vecteur propre. Le problème qui se pose maintenant est de voir comment obtenir les autres valeurs propres. L’idée est de se restreindre à un sous-espace perpendiculaire au sous-espace propre déjà connu. Ici on est en dimension 2 et on n’a qu’une droite à trouver, on essaye en faisant tourner U d’un angle droit pour avoir un nouveau vecteur que l’on espère propre à la matrice (remarquer la syntaxe de JavaScript pour les expressions) :
Bingo : On a un vecteur propre et la valeur propre associée est aisément reconnaissable : C’est φ-1. Ensuite, on a les coordonnées (obtenues numériquement) des vecteurs propres, on les copie-colle dans une matrice P que l’on inverse pour avoir P1 et on vérifie que le produit P1×M×P est bien une matrice diagonale à la précision de la machine près, et que c’est même $\left( \begin{array}{rr}\varphi&0\\0&\varphi - 1\end{array}\right)$ :

De nombreux exemples sont fournis avec le logiciel, sous la forme de « corrigés » de sujets du bac S.
Commentaires