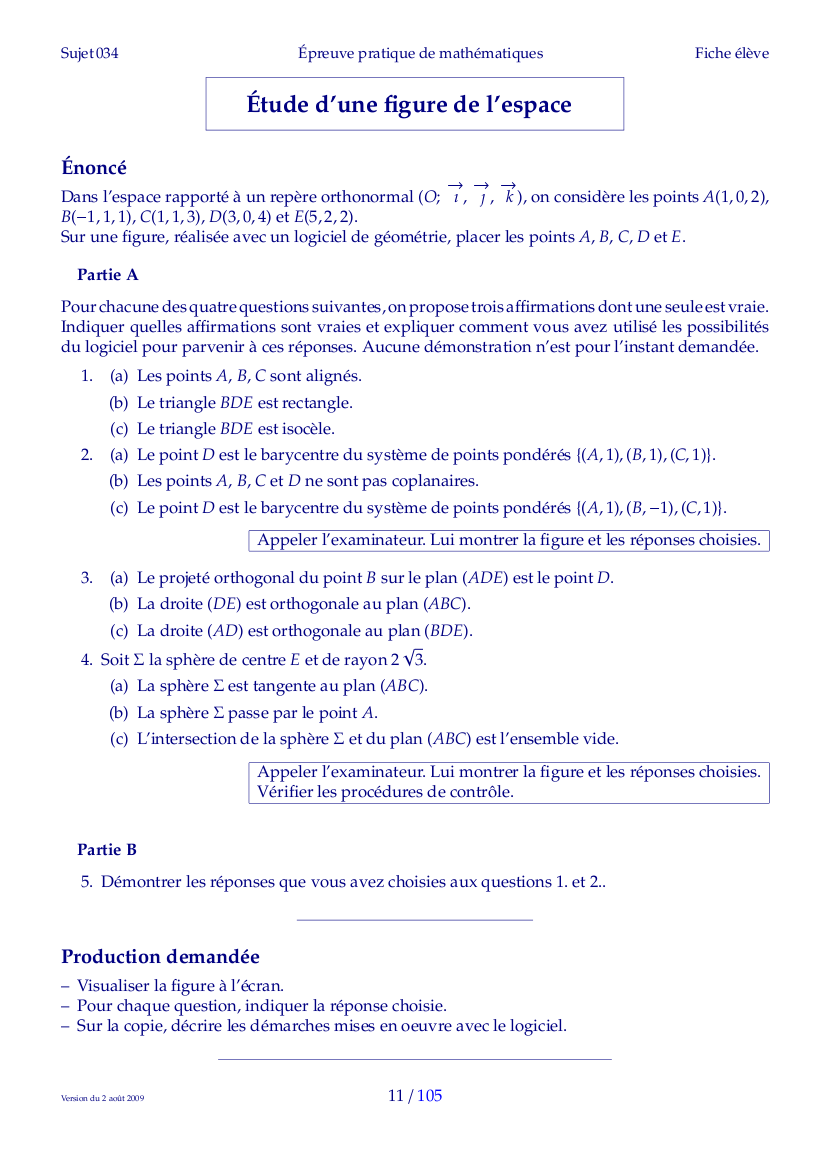
Sous CaRMetal, il faut ouvrir une nouvelle figure 3D pour bénéficier des macros spécifiques à la géométrie dans l’espace. Alors l’usage de la macro « coordonnées 3D » permet de construire successivement les points A, B, C, D et E :
Pour la suite, on a gommé les constructions afin de ne voir que la partie de la construction intéressante.
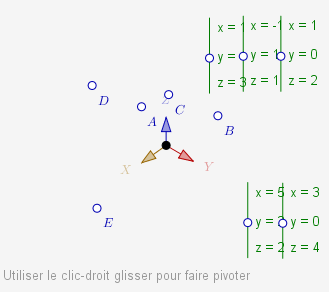
Question 1
La perspective cavalière conservant l’alignement, il suffit d’utiliser l’outil « test d’alignement » de CaRMetal pour conjecturer l’éventuel alignement de A, B et C. Pour la nature du triangle, CaRMetal n’étant pas vraiment un logiciel de géométrie dans l’espace [1], on se doit après avoir dessiné le triangle ABC, de le faire tourner dans tous les sens avec le clic-droit-glisser pour voir quelle forme il a :
Question 2
La perspective cavalière conserve aussi les barycentres, donc on peut
- utiliser la macro « point pondéré » (dans « barycentres ») pour affecter les masses 1, -1 et 1 à A, B et C
- utiliser la macro « barycentre de trois points » pour construire le barycentre de A(1), B(-1) et C(1) [2] :

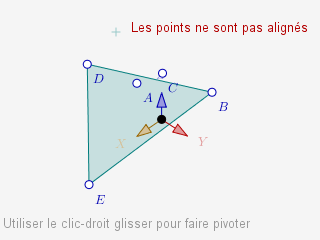
Question 3
En représentant le plan (ABC) par le quadrilatère ABCD et la droite (DE) par le segment [DE], on peut voir l’angle droit en faisant tourner la figure ci-dessous :
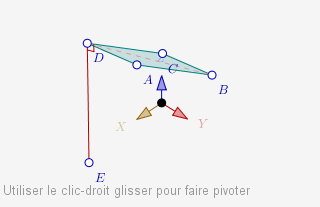
Question 4
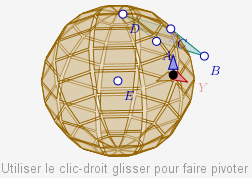
Problème : Il n’y a pas d’outil « sphère » dans CaRMetal : Il va falloir en construire une approximation polyédrale avec un CarScript
La figure produite est la suivante, qui permet de conjecturer la position relative du plan (représenté ici par un polygone) et de la sphère :
Commentaires